Διαφήμιση
Η ταυτόχρονη εντοπισμός και χαρτογράφηση (SLAM) πιθανότατα δεν είναι μια φράση που χρησιμοποιείτε καθημερινά. Ωστόσο, πολλά από τα πιο μοντέρνα τεχνολογικά θαύματα χρησιμοποιούν αυτή τη διαδικασία κάθε χιλιοστό του δευτερολέπτου της διάρκειας ζωής τους.
Τι είναι το SLAM; Γιατί το χρειαζόμαστε; Και ποιες είναι αυτές οι δροσερές τεχνολογίες για τις οποίες μιλάτε;
Από το αρκτικόλεξο στην αφηρημένη ιδέα
Εδώ είναι ένα γρήγορο παιχνίδι για εσάς. Ποιο από αυτά δεν ανήκει;
- Αυτοκίνητα
- Εφαρμογές επαυξημένης πραγματικότητας
- Αυτόνομα εναέρια και υποβρύχια οχήματα
- Φορέματα μικτής πραγματικότητας
- Η Roomba
Μπορεί να πιστεύετε ότι η απάντηση είναι εύκολα το τελευταίο στοιχείο στη λίστα. Κατά κάποιο τρόπο, έχετε δίκιο. Με άλλο τρόπο, αυτό ήταν ένα παιχνίδι τέχνασμα καθώς όλα αυτά τα στοιχεία σχετίζονται.

Το πραγματικό ερώτημα του (πολύ δροσερού) παιχνιδιού είναι αυτό: Τι καθιστά εφικτές όλες αυτές τις τεχνολογίες; Η απάντηση: ταυτόχρονος εντοπισμός και χαρτογράφηση, ή SLAM! όπως το λένε τα ωραία παιδιά.
Σε γενικές γραμμές, ο σκοπός των αλγορίθμων SLAM είναι αρκετά εύκολο να επαναληφθεί. Ένα ρομπότ θα χρησιμοποιεί ταυτόχρονα εντοπισμό και χαρτογράφηση για να εκτιμήσει τη θέση και τον προσανατολισμό του (ή να θέσει) στο διάστημα δημιουργώντας έναν χάρτη του περιβάλλοντός του. Αυτό επιτρέπει στο ρομπότ να εντοπίσει πού είναι και πώς να μετακινηθεί σε κάποιο άγνωστο χώρο.
Επομένως, ναι, αυτό που κάνει αυτός ο φανταχτερός αλγόριθμος είναι η εκτίμηση της θέσης. Μια άλλη δημοφιλής τεχνολογία, Παγκόσμιο σύστημα εντοπισμού θέσης (ή GPS) Πώς λειτουργεί η παρακολούθηση GPS και τι μπορείτε να παρακολουθείτε με αυτό;GPS. Το γνωρίζουμε ως την τεχνολογία που μας καθοδηγεί από το Α έως το Β. Αλλά το GPS είναι κάτι παραπάνω από αυτό. Υπάρχει ένας κόσμος πιθανότητας και δεν θέλουμε να το χάσετε. Διαβάστε περισσότερα εκτιμά τη θέση από τον πρώτο πόλεμο του Κόλπου της δεκαετίας του 1990.
Διαφοροποίηση μεταξύ SLAM και GPS
Γιατί λοιπόν γιατί χρειάζεται ένας νέος αλγόριθμος; Το GPS έχει δύο εγγενή προβλήματα. Πρώτον, ενώ το GPS είναι ακριβές σε σχέση με μια παγκόσμια κλίμακα, τόσο η ακρίβεια όσο και η ακρίβεια μειώνουν την κλίμακα σε σχέση με ένα δωμάτιο, ή ένα τραπέζι ή μια μικρή διασταύρωση. Το GPS έχει ακρίβεια έως και ένα μέτρο, αλλά τι το εκατοστό; Χιλιοστόμετρο?
Δεύτερον, το GPS δεν λειτουργεί καλά κάτω από το νερό. Όχι καλά δεν εννοώ καθόλου. Ομοίως, η απόδοση είναι ανώμαλη μέσα σε κτίρια με παχιά τσιμεντένια τοιχώματα. Ή σε υπόγεια. Παίρνετε την ιδέα. Το GPS είναι ένα δορυφορικό σύστημα, το οποίο πάσχει από φυσικούς περιορισμούς.
Έτσι, οι αλγόριθμοι SLAM στοχεύουν να δώσουν μια βελτιωμένη αίσθηση θέσης για τα πιο προηγμένα gadget και μηχανήματα.
Αυτές οι συσκευές διαθέτουν ήδη μια σειρά από αισθητήρες και περιφερειακά. Οι αλγόριθμοι SLAM χρησιμοποιούν τα δεδομένα από όσο το δυνατόν περισσότερα από αυτά χρησιμοποιώντας κάποια μαθηματικά και στατιστικά στοιχεία.
Κοτόπουλο ή αυγό; Θέση ή χάρτης;
Απαιτούνται μαθηματικά και στατιστικά στοιχεία για την απάντηση ενός περίπλοκου τεταρτημορίου: χρησιμοποιείται η θέση για τη δημιουργία του χάρτη του περιβάλλοντος ή χρησιμοποιείται ο χάρτης του περιβάλλοντος για τον υπολογισμό της θέσης;
Σκέψη χρόνο πειράματος! Είστε διαστατικά στρεβλωμένοι σε ένα άγνωστο μέρος. Ποιο είναι το πρώτο πράγμα που κάνεις; Πανικός? Εντάξει, ηρεμήστε, πάρτε μια ανάσα. Πάρτε ένα άλλο. Τώρα, ποιο είναι το δεύτερο πράγμα που κάνετε; Κοιτάξτε γύρω και προσπαθήστε να βρείτε κάτι οικείο. Μια καρέκλα είναι στα αριστερά σας. Ένα φυτό είναι στα δεξιά σας. Ένα τραπεζάκι σαλονιού είναι μπροστά σας.
Στη συνέχεια, όταν ο παράλυτος φόβος «Πού είμαι;» φθείρει, αρχίζετε να κινείστε. Περιμένετε, πώς λειτουργεί η κίνηση σε αυτή τη διάσταση; Κάντε ένα βήμα μπροστά. Η καρέκλα και το εργοστάσιο γίνονται μικρότερα και το τραπέζι μεγαλώνει. Τώρα, μπορείτε να επιβεβαιώσετε ότι στην πραγματικότητα προχωράτε.
Οι παρατηρήσεις είναι το κλειδί για τη βελτίωση της ακρίβειας της εκτίμησης SLAM. Στο παρακάτω βίντεο, καθώς το ρομπότ μετακινείται από δείκτη σε δείκτη, δημιουργεί έναν καλύτερο χάρτη του περιβάλλοντος.
Επιστροφή στην άλλη διάσταση, όσο περισσότερο περπατάτε τόσο περισσότερο προσανατολίζετε τον εαυτό σας. Το πάτημα προς όλες τις κατευθύνσεις επιβεβαιώνει ότι η κίνηση σε αυτήν τη διάσταση είναι παρόμοια με την ιδιότητα του σπιτιού σας. Καθώς πηγαίνετε προς τα δεξιά, το φυτό είναι μεγαλύτερο. Βοηθώντας, βλέπετε άλλα πράγματα που προσδιορίζετε ως ορόσημα σε αυτόν τον νέο κόσμο που σας επιτρέπουν να περιπλανηθείτε με μεγαλύτερη αυτοπεποίθηση.
Αυτή είναι ουσιαστικά η διαδικασία του SLAM.
Είσοδοι στη διαδικασία
Για να κάνουν αυτές τις εκτιμήσεις, οι αλγόριθμοι χρησιμοποιούν πολλά κομμάτια δεδομένων που μπορούν να κατηγοριοποιηθούν ως εσωτερικά ή εξωτερικά. Για το διαστατικό παράδειγμα μεταφοράς σας (παραδεχτείτε, είχατε ένα διασκεδαστικό ταξίδι), οι εσωτερικές μετρήσεις είναι το μέγεθος των βημάτων και της κατεύθυνσης.
Οι εξωτερικές μετρήσεις γίνονται με τη μορφή εικόνων. Ο εντοπισμός ορόσημων όπως το φυτό, η καρέκλα και το τραπέζι είναι μια εύκολη εργασία για τα μάτια και τον εγκέφαλο. Ο πιο ισχυρός επεξεργαστής γνωστός - ο ανθρώπινος εγκέφαλος - είναι σε θέση να τραβήξει αυτές τις εικόνες και όχι μόνο να αναγνωρίσει αντικείμενα, αλλά και να εκτιμήσει την απόσταση από αυτό το αντικείμενο.
Δυστυχώς (ή ευτυχώς, ανάλογα με τον φόβο σας για το SkyNet), τα ρομπότ δεν έχουν ανθρώπινο εγκέφαλο ως επεξεργαστή. Τα μηχανήματα βασίζονται σε τσιπ πυριτίου με ανθρώπινο γραπτό κώδικα ως εγκέφαλο.
Άλλα κομμάτια μηχανημάτων πραγματοποιούν εξωτερικές μετρήσεις. Περιφερειακά όπως γυροσκόπια ή άλλη αδρανειακή μονάδα μέτρησης (IMU) είναι χρήσιμα για να γίνει αυτό. Ρομπότ όπως αυτοκινούμενα αυτοκίνητα χρησιμοποιούν επίσης την οδομετρία της θέσης των τροχών ως εσωτερική μέτρηση.

Εξωτερικά, ένα αυτοκινούμενο αυτοκίνητο και άλλα ρομπότ χρησιμοποιούν το LIDAR. Παρόμοια με τον τρόπο με τον οποίο το ραντάρ χρησιμοποιεί ραδιοκύματα, το LIDAR μετρά τους ανακλώμενους παλμούς φωτός για τον προσδιορισμό της απόστασης. Το φως που χρησιμοποιείται είναι συνήθως υπεριώδες ή σχεδόν υπέρυθρο, παρόμοιο με έναν αισθητήρα βάθους υπερύθρων.
Το LIDAR στέλνει δεκάδες χιλιάδες παλμούς ανά δευτερόλεπτο για να δημιουργήσει έναν τρισδιάστατο χάρτη σύννεφων σημείων εξαιρετικά υψηλής ευκρίνειας. Λοιπόν, ναι, την επόμενη φορά που ο Tesla περιστρέφεται με αυτόματο πιλότο, θα σας πυροβολήσει με λέιζερ. Πολλές φορές.
Επιπλέον, οι αλγόριθμοι SLAM χρησιμοποιούν στατικές εικόνες και τεχνικές όρασης υπολογιστή ως εξωτερική μέτρηση. Αυτό γίνεται με μία μόνο κάμερα, αλλά μπορεί να γίνει ακόμη πιο ακριβές με ένα στερεοφωνικό ζεύγος.
Μέσα στο μαύρο κουτί
Οι εσωτερικές μετρήσεις θα ενημερώσουν την εκτιμώμενη θέση, η οποία μπορεί να χρησιμοποιηθεί για την ενημέρωση του εξωτερικού χάρτη. Οι εξωτερικές μετρήσεις θα ενημερώσουν τον εκτιμώμενο χάρτη, ο οποίος μπορεί να χρησιμοποιηθεί για την ενημέρωση της θέσης. Μπορείτε να το θεωρήσετε ως πρόβλημα συμπερασμάτων και η ιδέα είναι να βρείτε τη βέλτιστη λύση.
Ένας κοινός τρόπος για να το κάνετε αυτό είναι μέσω πιθανότητας. Τεχνικές όπως ένα φίλτρο σωματιδίων κατά προσέγγιση θέση και χαρτογράφηση χρησιμοποιώντας στατιστικά συμπεράσματα Bayesian.
Ένα φίλτρο σωματιδίων χρησιμοποιεί έναν καθορισμένο αριθμό σωματιδίων που απλώνονται από μια κατανομή Gaussian. Κάθε σωματίδιο «προβλέπει» την τρέχουσα θέση του ρομπότ. Μια πιθανότητα εκχωρείται σε κάθε σωματίδιο. Όλα τα σωματίδια ξεκινούν με την ίδια πιθανότητα.
Όταν γίνονται μετρήσεις που επιβεβαιώνουν η μία την άλλη (όπως το βήμα προς τα εμπρός = ο πίνακας μεγαλώνει), τότε τα σωματίδια που είναι «σωστά» στη θέση τους δίνουν σταδιακά καλύτερες πιθανότητες. Σωματίδια που είναι εκτός λειτουργίας έχουν χαμηλότερες πιθανότητες.
Όσο περισσότερα ορόσημα μπορεί να αναγνωρίσει ένα ρομπότ, τόσο το καλύτερο. Τα ορόσημα παρέχουν ανατροφοδότηση στον αλγόριθμο και επιτρέπουν ακριβέστερους υπολογισμούς.
Τρέχουσες εφαρμογές που χρησιμοποιούν αλγόριθμους SLAM
Ας το σπάσουμε αυτό, δροσερό κομμάτι τεχνολογίας με δροσερό κομμάτι τεχνολογίας.
Αυτόνομα υποβρύχια οχήματα (AUV)
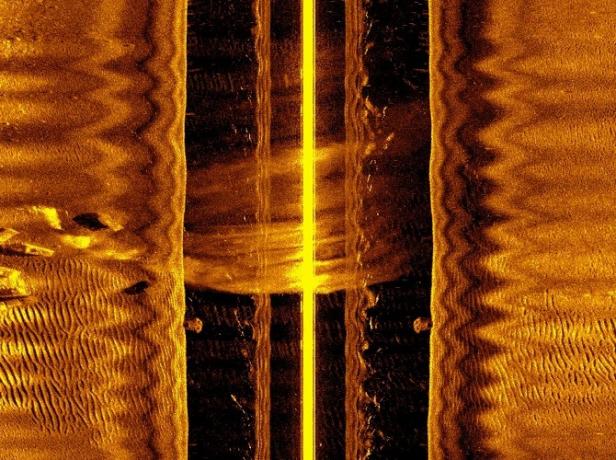
Τα μη επανδρωμένα υποβρύχια μπορούν να λειτουργούν αυτόνομα χρησιμοποιώντας τεχνικές SLAM. Ένα εσωτερικό IMU παρέχει δεδομένα επιτάχυνσης και κίνησης σε τρεις κατευθύνσεις. Επιπλέον, τα AUV χρησιμοποιούν σόναρ προς τα κάτω για εκτιμήσεις βάθους. Το σόναρ πλευρικής σάρωσης δημιουργεί εικόνες του πυθμένα της θάλασσας, με εμβέλεια δύο εκατοντάδων μέτρων.
Φορέματα μικτής πραγματικότητας
Η Microsoft και το Magic Leap έχουν παράγει γυαλιά που φοριούνται Εφαρμογές μικτής πραγματικότητας Windows Mixed Reality: Τι είναι και πώς να το δοκιμάσετε τώραΤο Windows Mixed Reality είναι μια νέα δυνατότητα που σας επιτρέπει να χρησιμοποιείτε τα Windows 10 σε εικονική και επαυξημένη πραγματικότητα. Εδώ είναι γιατί είναι συναρπαστικό και πώς να μάθετε αν το υποστηρίζει ο υπολογιστής σας. Διαβάστε περισσότερα . Η εκτίμηση της θέσης και η δημιουργία χάρτη είναι ζωτικής σημασίας για αυτά τα φορητά. Οι συσκευές χρησιμοποιούν το χάρτη για να τοποθετήσουν εικονικά αντικείμενα πάνω από πραγματικά αντικείμενα και να τα αλληλεπιδρούν μεταξύ τους.
Δεδομένου ότι αυτά τα φορητά είναι μικρά, δεν μπορούν να χρησιμοποιήσουν μεγάλα περιφερειακά όπως το LIDAR ή το σόναρ. Αντ 'αυτού, χρησιμοποιούνται μικρότεροι αισθητήρες βάθους υπερύθρων και εξωτερικές κάμερες για τη χαρτογράφηση ενός περιβάλλοντος.
Αυτοκίνητα Αυτοκινήτου
Τα αυτόνομα αυτοκίνητα έχουν λίγο πλεονέκτημα έναντι των φορητών. Με πολύ μεγαλύτερο φυσικό μέγεθος, τα αυτοκίνητα μπορούν να κρατούν μεγαλύτερους υπολογιστές και να έχουν περισσότερα περιφερειακά για εσωτερικές και εξωτερικές μετρήσεις. Με πολλούς τρόπους, τα αυτοκινούμενα αυτοκίνητα αντιπροσωπεύουν το μέλλον της τεχνολογίας, τόσο από άποψη λογισμικού όσο και υλικού.
Η τεχνολογία SLAM βελτιώνεται
Με την τεχνολογία SLAM να χρησιμοποιείται με πολλούς διαφορετικούς τρόπους, είναι θέμα χρόνου πριν τελειοποιηθεί. Μόλις τα αυτοκινούμενα αυτοκίνητα (και άλλα οχήματα) εμφανίζονται καθημερινά, θα γνωρίζετε ότι η ταυτόχρονη τοπική προσαρμογή και χαρτογράφηση είναι έτοιμη για χρήση από όλους.
Η τεχνολογία αυτο-οδήγησης βελτιώνεται καθημερινά. Θέλετε να μάθετε περισσότερα; Δείτε τη λεπτομερή ανάλυση του MakeUseOf για πώς λειτουργούν τα αυτοκινούμενα αυτοκίνητα Πώς λειτουργούν τα αυτοκίνητα αυτο-οδήγησης: Τα παξιμάδια και τα μπουλόνια πίσω από το αυτόνομο πρόγραμμα αυτοκινήτων της GoogleΝα είστε σε θέση να μετακινηθείτε μπρος-πίσω στη δουλειά ενώ κοιμάστε, τρώτε ή παρακολουθείτε το αγαπημένο σας Τα ιστολόγια είναι μια ιδέα που είναι εξίσου ελκυστική και φαινομενικά μακρινή και πολύ φουτουριστική συμβεί. Διαβάστε περισσότερα . Μπορεί επίσης να σας ενδιαφέρει πώς οι χάκερ στοχεύουν συνδεδεμένα αυτοκίνητα.
Πιστωτική εικόνα: chesky_w /Depositphotos
Ο Τομ είναι Μηχανικός Λογισμικού από τη Φλόριντα (φωνάζει στον Florida Man) με πάθος για γραφή, ποδόσφαιρο στο κολέγιο (go Gators!), CrossFit και κόμματα της Οξφόρδης.