Διαφήμιση
Τα τηλεκατευθυνόμενα αυτοκίνητα είναι διασκεδαστικά, σίγουρα, αλλά αυτο-οδήγηση τα ρομποτικά αυτοκίνητα είναι ακόμα πιο διασκεδαστικά. Σε αυτό το σεμινάριο, θα κατασκευάσουμε ένα ρομπότ τεσσάρων τροχών που μπορεί να οδηγήσει γύρω και να αποφύγει τα εμπόδια. αγόρασα αυτό το πλήρες κιτ 4WD από το AliExpress, αλλά θα μπορούσατε εύκολα να αγοράσετε τα περισσότερα από αυτά τα εξαρτήματα από ένα ηλεκτρονικό κατάστημα και να τα συνθέσετε μόνοι σας.
Σας προτείνω να διαβάσετε όλες τις οδηγίες πριν ξεκινήσετε, καθώς αυτό θα κάνει κάποια πράγματα καθαρά που θα μπορούσαν να προκαλέσουν σύγχυση την πρώτη φορά. Επίσης, αυτό μπορεί να μοιάζει με ένα πολύ μεγάλο, προηγμένο έργο λόγω του μήκους των οδηγιών, αλλά είναι πραγματικά πολύ απλό. Δεν χρειάζεται να εκφοβίζεστε - αυτό είναι ένα έργο αρχάριου επίπεδο που μπορείτε να πάρετε μερικά ικανοποιητικά αποτελέσματα με, στη συνέχεια, να αξιοποιήσει καθώς μάθετε περισσότερα. Δεν σας αρέσει αυτό το στυλ ρομπότ; Ακολουθούν μερικά ακόμα Ρομπότ Arduino 8 Robots Arduino μπορείτε να χτίσετε για λιγότερο από $ 125 Το Arduino μπορεί να κάνει πολλά, αλλά ξέρατε ότι μπορεί να δημιουργήσει πλήρη ρομπότ; Για αρκετά φτηνό, πάρα πολύ! Διαβάστε περισσότερα θα μπορούσατε εύκολα να οικοδομήσουμε αντ 'αυτού.
Ακολουθεί αυτό που έχουμε, αφού αφαιρέσαμε τα πάντα από τη συσκευασία:

Για να ξεκινήσετε, θα συνδέσουμε τους κινητήρες και τη γέφυρα H (την κάρτα που τροφοδοτεί τους κινητήρες) στο κάτω μέρος του πλαισίου. Κατ 'αρχάς, συνδέστε τους τέσσερις μεταλλικούς βραχίονες (είναι ορθογώνια, τρυπημένα μπλοκ μετάλλων) σε κάθε κινητήρα χρησιμοποιώντας δύο μακριές βίδες και δύο παξιμάδια.

Θα πρέπει να βεβαιωθείτε ότι έχουν συνδεθεί σωστά, επομένως ελέγξτε την παρακάτω εικόνα για να βεβαιωθείτε ότι η πλευρά του μπλοκ με δύο τρυπημένες οπές θα κοιτάξει προς τα κάτω. Σημειώστε ότι τα καλώδια σε κάθε μοτέρ δείχνουν προς το κέντρο του πλαισίου.

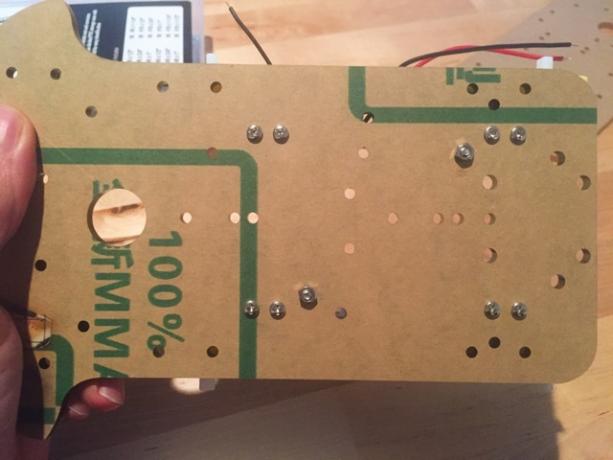
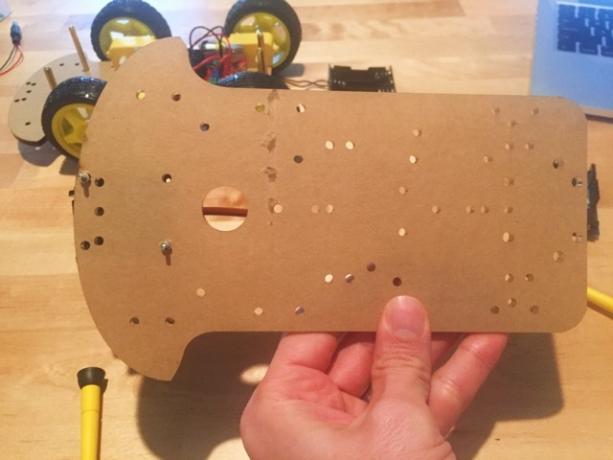
Τώρα κάθε μοτέρ μπορεί να συνδεθεί στο πλαίσιο χρησιμοποιώντας δύο κοντούς μπουλόνια στο κάτω μέρος κάθε μεταλλικού βραχίονα. Εδώ είναι μια άποψη του κάτω μέρους του πλαισίου, ώστε να μπορείτε να δείτε πού πρέπει να είναι τα μπουλόνια:

Το επόμενο βήμα είναι να εξασφαλίσουμε τη γέφυρα H (που είναι το κόκκινο χαρτόνι, στο κιτ μου) στο πλαίσιο. Μπορεί να θέλετε να περιμένετε μέχρι όλα τα καλώδια να συνδεθούν στη γέφυρα του Η πριν κάνετε αυτό, αλλά αυτό εξαρτάται από εσάς (το βρήκα ευκολότερο). Μια γρήγορη σημείωση: στο κιτ μου έλειπε ένας αριθμός συνδετήρων, οπότε χρησιμοποίησα ηλεκτρική ταινία για να ασφαλίσω τη γέφυρα. Ωστόσο, μπορείτε να δείτε εδώ πού θα είχαν βγει τα μπουλόνια και τα καρύδια:
Τώρα που έχει συνδεθεί η γέφυρα H, μπορείτε να ξεκινήσετε την καλωδίωση της τροφοδοσίας. Επειδή η θήκη μπαταριών έξι AA είναι εφοδιασμένη με προσαρμογέα DC, θα χρειαστεί είτε να αποκόψετε το άκρο (το οποίο έκανα) είτε να τρέξετε καλώδια βραχυκυκλώματος στις ίδιες τις μπαταρίες.

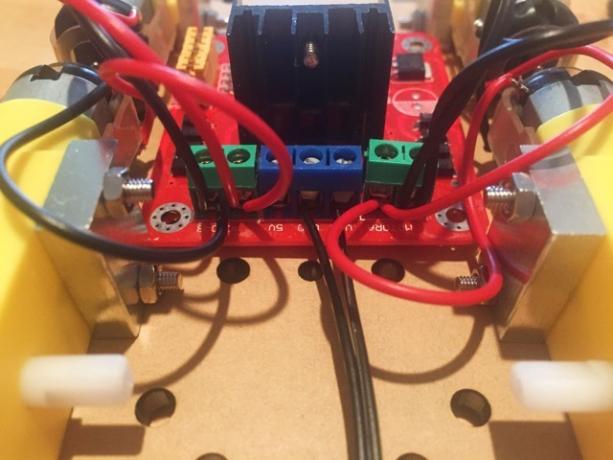
Ανεξάρτητα από το πώς αποφασίζετε να το κάνετε, θα εκτελέσετε το θετικό καλώδιο στη θύρα με την ένδειξη "VMS" και το αρνητικό καλώδιο στο σήμα που φέρει την ένδειξη "GND" στη γέφυρα. Βιδώστε τους συνδέσμους και βεβαιωθείτε ότι είναι ασφαλείς. Στη συνέχεια, θα συνδέσετε τα καλώδια του κινητήρα. Από τις δύο πλευρές, υπάρχει ένα σύνολο από δύο θύρες. το ένα φέρει την ένδειξη "MOTORA" και το άλλο "MOTORB". Και τα δυο κόκκινα σύρματα σε κάθε πλευρά θα πάνε στην κεντρική πράσινη θύρα, και τα δύο μαύρα σύρματα θα πάνε στο εξώτατο. Αυτή η εικόνα θα πρέπει να καταστήσει σαφέστερη:
Βρήκα ότι έπρεπε να απογυμνώσω μερικά από το περίβλημα από τα καλώδια του κινητήρα για να το βάλω σε λειτουργία. Τώρα που έχετε τους κινητήρες και την τροφοδοσία ρεύματος όλα καλωδιωμένα προς τα πάνω, σύρετε τους τροχούς στους άξονες κίνησης του κινητήρα και συνδέστε τους τέσσερις άξονες χαλκού στις θέσεις που εμφανίζονται στην παρακάτω εικόνα (κάθε άξονας χαλκού χρειάζεται ένα μικρό μπουλόνι). Αυτό το ρομπότ αρχίζει να παίρνει σχήμα!

Τώρα, τοποθετήστε το μέρος του πλαισίου στην άκρη και αρπάξτε το άλλο που θα καθίσει στην κορυφή. Το επόμενο βήμα είναι να συνδέσετε το Arduino - πάλι, έπρεπε να χρησιμοποιήσω ηλεκτρική ταινία, αλλά θα πρέπει να είστε σε θέση να ασφαλίσετε καλύτερα με μερικά μπουλόνια και καρύδια.

Το επόμενο βήμα απαιτεί το μικρο σερβο, το μαύρο σταυρό, το στήριγμα σερβο (που αποτελείται από τρία μαύρα πλαστικά κομμάτια) και μερικές μικρές βίδες. Χρησιμοποιήστε μία από τις μεγαλύτερες αιχμηρές βίδες στο κιτ για να συνδέσετε το μαύρο σταυρό στο μικρο σερβο:

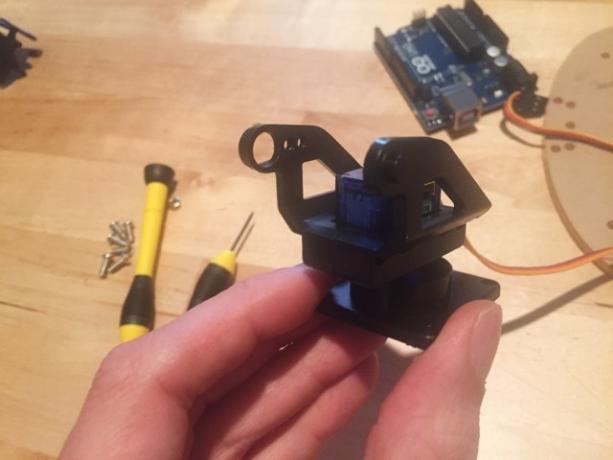
Στη συνέχεια γυρίστε το σέρβο ανάποδα στο μαύρο πλαστικό δακτύλιο της θήκης. Βεβαιωθείτε ότι τα καλώδια που βγαίνουν από το σερβο βλέπουν προς την ίδια κατεύθυνση με το μακρύτερο τμήμα της θήκης (και πάλι, δείτε το εικόνα παρακάτω) και χρησιμοποιήστε τέσσερις μικροσκοπικές βίδες για να στερεώσετε την εγκάρσια μπάρα (υπάρχουν τέσσερις τρύπες στο στήριγμα που ευθυγραμμίζονται με τις οπές στο καθετή γραμμή).

Ας δούμε τι φαίνεται, αφού επισυνάπτεται:

Τέλος, βγάλτε τα άλλα δύο κομμάτια της θήκης σερβό και σπρώξτε τα επάνω στο σέρβο (υπάρχουν αυλακώσεις στα πλευρικά κομμάτια που ταιριάζουν με την πλαστική γλωττίδα στο σερβο).
Τώρα που η θήκη σερβο συμπλήρωσε, μπορεί να τοποθετηθεί στο πλαίσιο.

Εδώ βρίσκονται οι βίδες:
Ήρθε η ώρα να δώσουμε στο ρομπότ μας μερικά μάτια. Συνδέστε τον υπερηχητικό αισθητήρα στο στήριγμα σερβομηχανής χρησιμοποιώντας δύο φερμουάρ.

Εάν εργάζεστε από το ίδιο κιτ με το οποίο είμαι, θα έχετε λάβει μια ασπίδα αισθητήρα Arduino. Δεν θα το χρησιμοποιήσουμε σε αυτό το build, αλλά μπορείτε να το ανοίξετε πάνω από το UNO τώρα αν θέλετε (όπως έχω στην παρακάτω εικόνα). Απλώς ευθυγραμμίστε τις ακίδες στο κάτω μέρος της θωράκισης με τις θύρες εισόδου / εξόδου στο Arduino και πιέστε προς τα κάτω για να τις συνδέσετε. Δεν το χρειάζεστε αυτή τη στιγμή, αλλά οι ασπίδες μπορούν να φανούν χρήσιμες Οι κορυφαίες 4 ασπίδες Arduino για να υπερέχουν τα έργα σαςΈχετε αγοράσει ένα κιτ εκκίνησης Arduino, έχετε παρακολουθήσει όλους τους βασικούς οδηγούς, αλλά τώρα έχετε χτυπήσει ένα εμπόδιο - χρειάζεστε περισσότερα κομμάτια και bobs για να πραγματοποιήσετε το όνειρο ηλεκτρονικών σας. Ευτυχώς, αν έχετε ... Διαβάστε περισσότερα .

Είτε συνδέετε μια ασπίδα αισθητήρα είτε όχι, θα χρειαστείτε τώρα τέσσερα καλώδια για να συνδέσετε τον υπερηχητικό αισθητήρα στο Arduino. Υπάρχουν τέσσερις ακίδες στον αισθητήρα, VCC, GND, TRIG και ECHO. Συνδέστε το VCC στον ακροδέκτη 5V των ακίδων Arduino, GND to GND και TRIG και ECHO στις I / O καρφίτσες 12 και 13.
Τώρα πιάστε το κάτω μέρος του πλαισίου και συνδέστε έξι καλώδια βραχυκυκλωτήρα στις ακίδες εισόδου / εξόδου της γέφυρας H (σημαίνονται ENA, IN1, IN2, IN3, IN4 και ENB). Σημειώστε ποια καλώδια χρώματος είναι συνδεδεμένα σε ποιες θύρες, όπως θα πρέπει να γνωρίζετε αργότερα.

Τώρα ήρθε η ώρα να αρχίσετε να βάζετε αυτό το πράγμα μαζί. Πιάστε το πάνω μέρος του πλαισίου και τοποθετήστε το επάνω από τους χάλκινους άξονες που συνδέονται με το κάτω μέρος και τραβήξτε τα καλώδια που είναι προσαρτημένα στη γέφυρα H μέσω της οπής στο κέντρο του πλαισίου. Συνδέστε τα έξι καλώδια στις θύρες I / O ως εξής:
- ENA στη θύρα εισόδου / εξόδου 11
- ENB στη θύρα εισόδου / εξόδου 10
- A1 στη θύρα εισόδου / εξόδου 5
- A2 στη θύρα εισόδου / εξόδου 6
- B1 στη θύρα εισόδου / εξόδου 4
- B2 στη θύρα εισόδου / εξόδου 3

Τώρα, χρησιμοποιήστε τέσσερις μικρές βίδες για να συνδέσετε το άνω τμήμα του πλαισίου στους χάλκινους άξονες. Ρυθμίστε τη θήκη μπαταριών έξι AA στην κορυφή του πλαισίου (βιδώστε το αν μπορείτε), συνδέστε τη θήκη κυττάρων 9V στο Arduino και αυτό το bot είναι έτοιμο να βράσει!

Λοιπόν, σχεδόν έτοιμος να ροκάρει. Δεν έχει ακόμα αρκετά προσωπικότητα.
Πάμε εκεί. Τώρα για να του δώσει ένα μυαλό. Ας κάνουμε κάποιο προγραμματισμό.
Το πρώτο πράγμα που θα κάνουμε είναι να δοκιμάσουμε να βεβαιωθείτε ότι η γέφυρα και οι κινητήρες είναι συνδεδεμένοι σωστά. Εδώ είναι ένα γρήγορο σκίτσο που θα πει το bot να οδηγεί προς τα εμπρός για μισό δευτερόλεπτο, να οδηγεί προς τα πίσω για μισό δευτερόλεπτο, μετά στρίψτε αριστερά και δεξιά:
Αυτός είναι ένας πολύς κώδικας για μια απλή δοκιμή, αλλά ο καθορισμός όλων αυτών των λειτουργιών καθιστά ευκολότερο να τσίμπημα αργότερα. (Ευχαριστώ πολύ για τον Billwaa για το δικό του blog post σχετικά με τη χρήση της γέφυρας H για τον ορισμό αυτών των λειτουργιών.) Εάν κάτι πήγε στραβά, ελέγξτε όλες τις συνδέσεις σας και ότι τα καλώδια είναι συνδεδεμένα με τους σωστούς ακροδέκτες. Αν όλα λειτουργούσαν, ήρθε η ώρα να προχωρήσουμε στη δοκιμή του αισθητήρα. Για να χρησιμοποιήσετε τον υπερηχητικό αισθητήρα, θα θελήσετε κατεβάστε τη βιβλιοθήκη NewPing, και στη συνέχεια να χρησιμοποιήσετε Σκίτσο> Συμπερίληψη βιβλιοθήκης> Προσθήκη βιβλιοθήκης .ZIP ... για να φορτώσετε τη βιβλιοθήκη.

Βεβαιωθείτε ότι βλέπετε τη δήλωση συμμετοχής στο πάνω μέρος του σχεδίου σας. αν δεν το κάνετε, χτυπήστε Σκίτσο> Συμπερίληψη βιβλιοθήκης> NewPing. Μόλις το κάνετε, φορτώστε το παρακάτω σκίτσο:
Μεταφορτώστε το σκίτσο και ανοίξτε τη σειριακή οθόνη χρησιμοποιώντας Εργαλεία> Σειριακή οθόνη. Θα πρέπει να δείτε μια ταχεία ενημέρωση των αριθμών. Κρατήστε το χέρι σας μπροστά από τον αισθητήρα και δείτε αν αυτός ο αριθμός αλλάζει. Μετακινήστε το χέρι σας μέσα και έξω και θα πρέπει να μετρήσετε πόσο μακριά είναι το χέρι σας από τον αισθητήρα.

Εάν όλα λειτουργούν σωστά, ήρθε η ώρα να τα βάλουμε όλα μαζί και αφήστε αυτό το πράγμα να τρέξει! Εδώ είναι ο κώδικας για το ρομπότ τώρα. Όπως ίσως μπορείτε να πείτε, αυτό είναι βασικά τα δύο σκαρίφημα δοκιμής μαζί με μια πρόσθετη if statement για τον έλεγχο της συμπεριφοράς του ρομπότ. Έχουμε δώσει μια πολύ απλή συμπεριφορά αποφυγής εμποδίων: εάν ανιχνεύσει κάτι λιγότερο από τέσσερα εκατοστά μακριά, θα δημιουργήσει αντίγραφα ασφαλείας, θα στρίψει αριστερά και θα ξαναρχίσει να κινείται. Εδώ είναι ένα βίντεο του bot στη δράση.
Δώστε στον Robot σας κάποια ζωή
Αφού αποκτήσετε αυτή τη συμπεριφορά, μπορείτε να προσθέσετε πιο περίπλοκη συμπεριφορά. Κάντε το ρομπότ εναλλασσόμενο μεταξύ στροφή αριστερά και δεξιά, ή επιλέξτε τυχαία? ακούγεται ένας βομβητής αν πλησιάσει κάτι. απλά γυρίστε, αντί να δημιουργήσετε αντίγραφα ασφαλείας. Είστε πραγματικά μόνο περιορισμένη από τη φαντασία σας. Θα μπορούσατε να χρησιμοποιήσετε σχεδόν οτιδήποτε στο δικό σας Σετ εκκίνησης Arduino Τι είναι το κιτ εκκίνησης Arduino; [Αρχάριοι Arduino]Αντιμετωπίζοντας ένα κουτί γεμάτο ηλεκτρονικά εξαρτήματα, είναι εύκολο να σας συγκλονίσει. Εδώ είναι ένας οδηγός για το τι ακριβώς θα βρείτε στο κιτ σας. Διαβάστε περισσότερα για να προσθέσετε περισσότερες λειτουργίες. Θα παρατηρήσετε επίσης ότι δεν έχουμε κωδικοποιήσει τίποτα για το σερβο ακόμα: μπορείτε πραγματικά να κάνετε τα "μάτια" του ρομπότ σας να μετακινούνται εμπρός και πίσω. ίσως να τα χρησιμοποιούν για να αναζητήσουν ένα μονοπάτι αντί να δημιουργούν αντίγραφα ασφαλείας μόνο όταν βρίσκει ένα εμπόδιο άμεσα μπροστά.
Ενημερώστε μας αν αποφασίσετε να δημιουργήσετε αυτό το ρομπότ ή άλλο και να μας πείτε πώς αποφασίζετε να προσαρμόσετε τη συμπεριφορά ή την εμφάνισή του. Αν έχετε οποιεσδήποτε ερωτήσεις σχετικά με αυτό το ρομπότ, τα δημοσιεύστε στα παρακάτω σχόλια και θα δω αν μπορώ να βοηθήσω!
Ο Dann είναι μια στρατηγική περιεχομένου και σύμβουλος μάρκετινγκ που βοηθά τις εταιρείες να δημιουργούν ζήτηση και οδηγεί. Επίσης, blogs σχετικά με τη στρατηγική και το περιεχόμενο μάρκετινγκ στο dannalbright.com.


